We have simulated the contact pressure (0.061-0.17 MegaPascals) that appear between the tips and micro object (see Fig. 1) and it is obvious that we obtain a small gripping force needed to not damage the sample. These demonstrate the gentle handling force give by the polymeric material used to fabricate the microgripper arms.
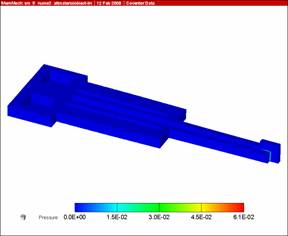
Fig. 1 Microgripper tips in contact with a micro object gripped -simulation
A new design for a polymeric microgripper was developed. Two microgripper with different dimensions were considered.
Fig. 2 Design of the half of microgripper model without the SU-8 layer on the top;
a) first model; b) second model
For the second microgripper, a low temperature is reached for the same voltage values applied, compared with first model.
Fig. 3. The maximal values of the temperatures
obtained in the microgrippers
Fig. 4. Comparison of displacements of the tips
for both microgrippers
We observed also that the displacements in the plane direction are higher for the second model and in consequence low voltage values are needed to actuate this structure, since the temperatures are lower.